Wie kann Sicherheit getestet werden? Das Rokit-Projekt differenziert in funktionale und empfundene Sicherheit und setzt verschiedene Test-Methoden ein, um eine sichere der Mensch-Roboter Interaktion zu untersuchen.
Funktionale und empfundene Sicherheit
Wir unterscheiden in funktionale und empfundene Sicherheit. Funktionale Sicherheit ist die de facto Sicherheit des Roboters, dazu zählt beispielsweise die Fähigkeit, einen Menschen zu erkennen und rechtzeitig zu stoppen, so dass der Mensch nicht angefahren wird. Sie ist durch Normen und Gesetze vorgeschrieben und gilt in jedem Fall. Ein unsicherer Roboter darf nicht betrieben werden.
Die empfundene Sicherheit umschreibt das Sicherheitsgefühl des Menschen. Mit wie viel Abstand muss der Roboter stoppen, damit der Mensch sich sicher fühlt? Hier gibt es keine verbindlichen Vorgaben, aber das Vertrauen der Nutzer*innen in einen Roboter ist entscheidend für die Akzeptanz.
Beides wird getestet, denn für einen erfolgreichen Einsatz von Robotern im öffentlichen Raum muss sowohl die funktionale als auch die empfundene Sicherheit gewährleistet sein.
Sicherheit: Testen in Schritten
Das Testen von Sicherheit ist hochkomplex und kann nur schrittweise erfolgen.
- Physische Eigenschaften: Als erstes müssen die physischen Eigenschaften des Roboters überprüft werden. Was ist beispielsweise der Bremsweg? Daran schließt sich die Frage an, wie sich die Eigenschaften in Relation zur Umwelt verändern. Wie verändert sich der Bremsweg auf nassem Gras? Oder auf sandigen Wegen? Hier spielt der Einsatzzweck eine entscheidende Rolle. Je nach dem, in welcher Umwelt der Roboter später eingesetzt wird, unterscheiden sich auch die Testszenarien.
- Die Interaktion: Als nächsten Schritt gilt es die Interaktion zwischen Mensch und Roboter zu testen. Dabei muss man sich eine große Spannbreite anschauen: Im öffentlichen Raum können Interaktionen sowohl gewollt als auch ungewollt sein. Vielleicht koexistieren Mensch und Roboter auch einfach nebeneinander. In jedem Fall spielt bei der Interaktion neben der funktionalen auch die empfundene Sicherheit eine wichtige Rolle. Geprüft wird deshalb nicht nur, ob der Roboter den Menschen rechtzeitig erkennt – sondern auch, was genau „rechtzeitig“ in diesem Kontext überhaupt bedeutet. Heißt „rechtzeitig“ immer, dass sich der Roboter an die (uns meist unbewussten) Abstandsregeln zwischen Menschen halten muss?
- Spezifizieren: Das bringt uns zum letzten Schritt: Die Testszenarien werden an die spezifischen Einsatzzweckeangepasst. Die Frage, was „rechtzeitig“ heißt, wird jetzt spezifischer: In einem engen und vollen Elektromarkt hat der Mensch beispielsweise ein anderes Abstandsempfinden als auf einer weiten Parkwiese.
Test-Methoden: Testumgebung, Virtuelle Realitäten und Feldtests
Um Sicherheit zu testen, gibt es verschiedene Ansätze. Im Rokit-Cluster setzen wir gängige Methoden ein und evaluieren diese.
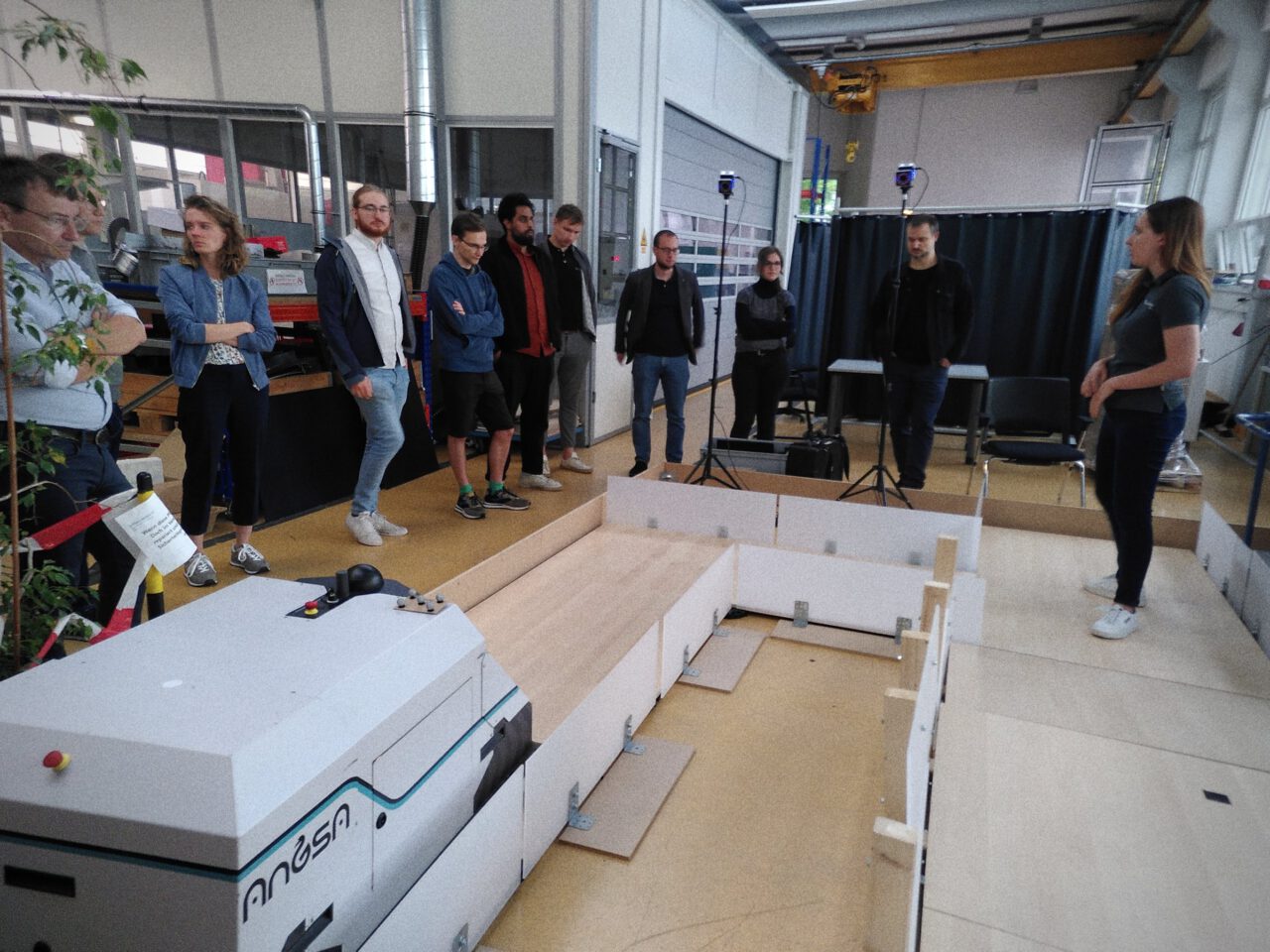
In der Testumgebung vom Fraunhofer IPA werden die technische Zuverlässigkeit und die Interaktionsperformanz der Roboter, zu der auch die empfundene Sicherheit gehört, getestet: Der Roboter fährt über modular zusammensetzbare Bodenplatten. Er muss um Kurven navigieren und Rampen hinauf fahren. Kameras detektieren sein Fahrverhalten und werten es aus.
Außerdem wird eine virtuelle Realität simuliert. Proband*innen können sich mit Hilfe einer VR-Brille durch einen Elektromarktbewegen, einem Roboter begegnen und in Interaktion mit ihm treten. Sie können dem Roboter eine Frage stellen ihm den Weg versperren oder um ihn herum gehen. Anschließend werden Fragebögen ausgefüllt, um die empfundene Sicherheit der Proband*innen abzufragen.
Die „Königsdisziplin“ der Testmethoden sind die Feldtests, also Tests in der realen Einsatzumgebung, sei es im echten Elektromarkt oder in Berliner Parks. Im Rokit-Projekt werden die Roboter MULI, ANGSA und Spot auch in realen Umgebungeneingesetzt und getestet. Natürlich finden diese Feldtests zunächst in abgegrenzten Räumen und unter strenger Aufsicht statt. Dennoch kann es hier zu unvorhergesehen und deshalb besonders spannenden Begegnungen kommen. Der erste Feldtest mit dem Roboter MULI im Elektromarkt in Chemnitz findet im Herbst 2023 statt.
